Overview¶
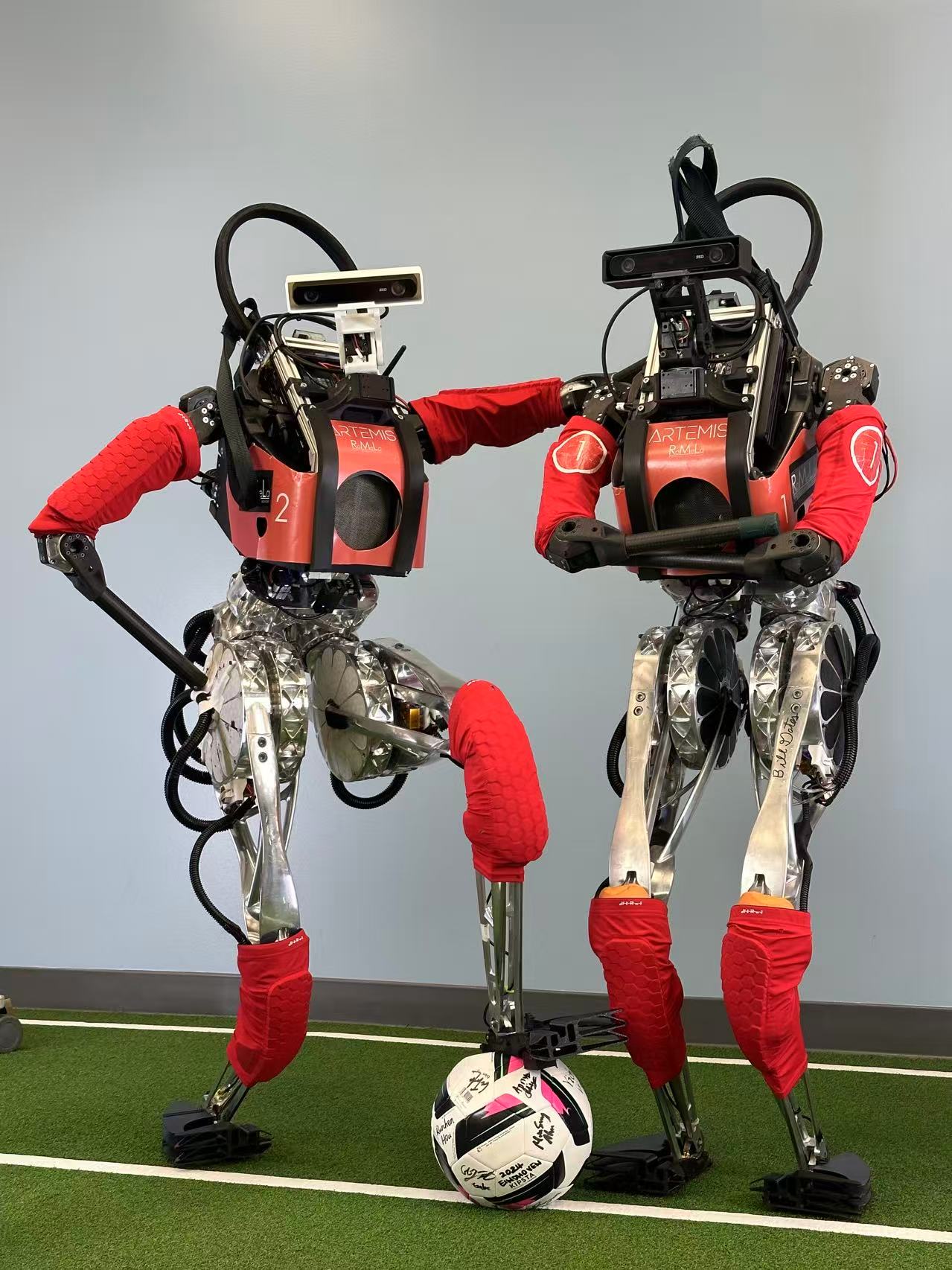
RoboCup is a fully autonomous humanoid robot soccer competition. As a core team member, I participated in RoboCup 2023 and 2024, winning the 2024 championship with ARTEMIS (Advanced Robotic Technology for Enhanced Mobility and Improved Stability), a fully integrated adult-sized humanoid soccer platform.
Highlights
- 45 goals scored across 6 matches
- State-of-the-art high-speed locomotion on a robust hardware platform
- Advanced path planning, tracking, and real-time obstacle avoidance
- Exceptionally powerful and dynamic in-gait kicking
- Highly robust and accurate vision-based perception and localization
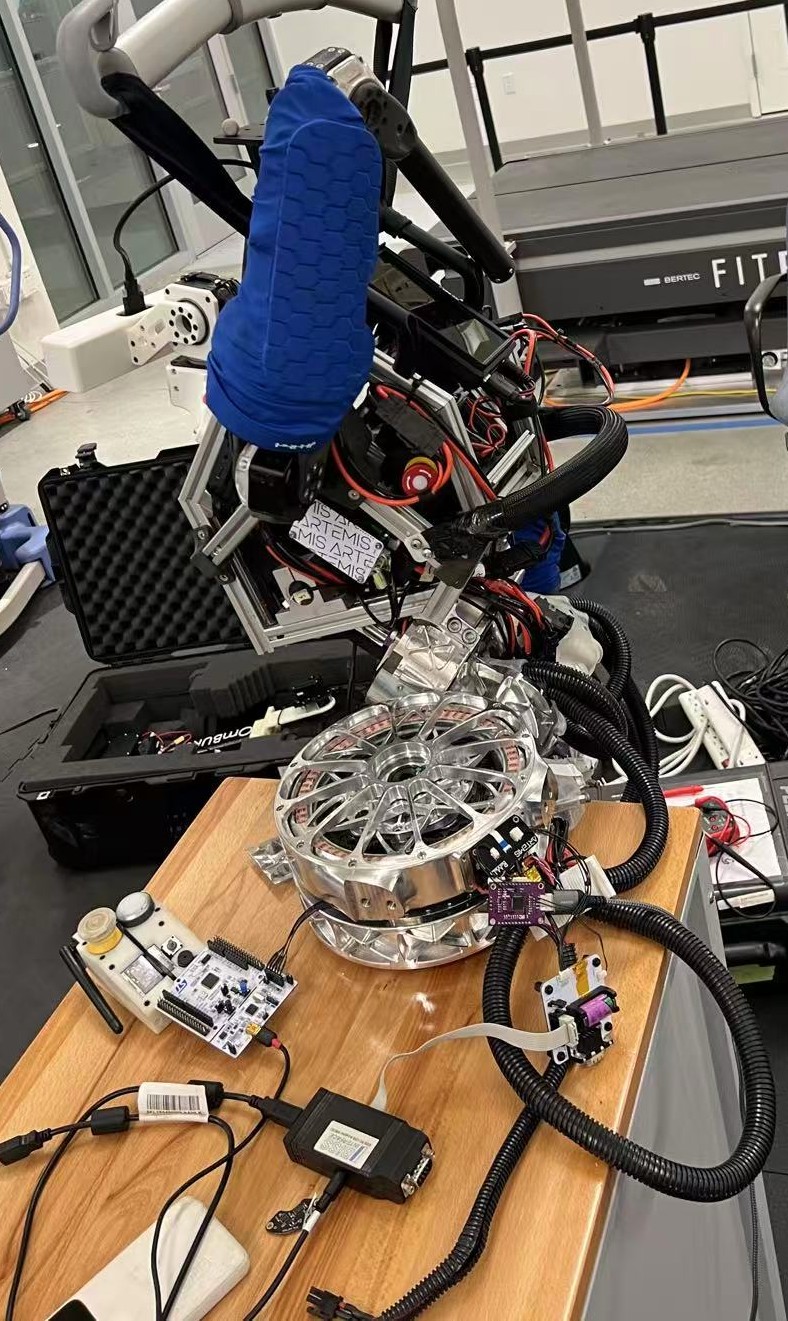
Hardware Maintenance¶
I helped maintain the ARTEMIS hardware platform from 2023 onward, supporting both routine operation and competition deployment. My responsibilities included assembly and disassembly for transport and on-site staging, actuator testing and encoder calibration, wiring and harness management, and the design and development of a mobile gantry system for safely servicing ARTEMIS.

Trajectory Planning and Tracking¶
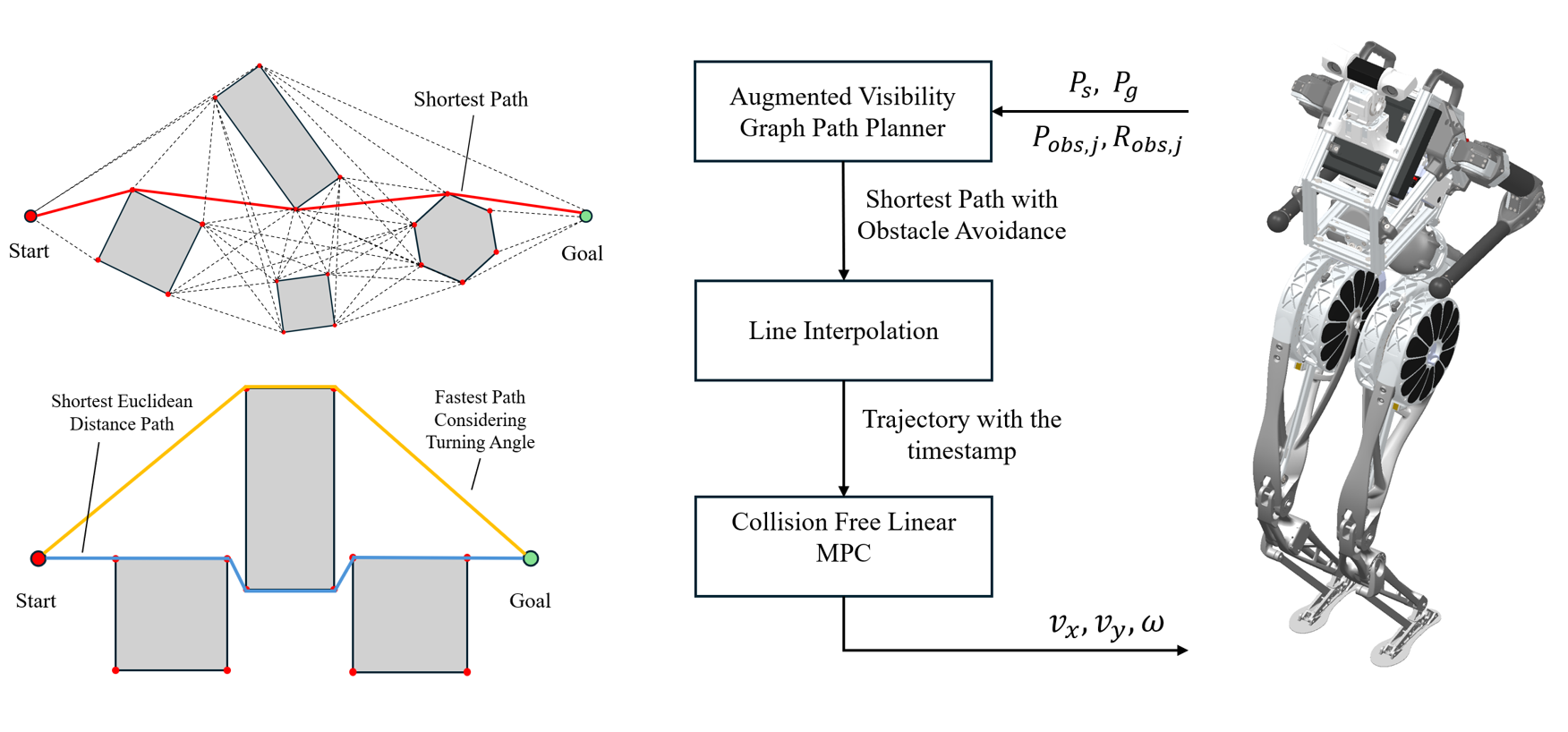
Trajectory planning and tracking are central to ARTEMIS’s ability to navigate the field and execute complex soccer maneuvers. I developed a navigation stack based on Dynamic Augmented Visibility Graphs (DAVG), which plans efficient paths while explicitly accounting for turning cost—an important constraint for humanoid robots. These paths are tracked using a collision-free MPC (cf-MPC) controller that jointly handles robot dynamics and obstacle avoidance, enabling smooth and reliable motion in dynamic competition environments. Significant effort was devoted to integrating perception, localization, and motion signals, carefully tuning the system to handle sensing noise, timing mismatches, and communication latency during real-world deployment.
Simulation & Testing¶
The three panels below showcase our trajectory planning validation across different environments:


Locomotion Tuning¶
I also helped on tuning the locomotion of ARTEMIS to ensure consistant walking and kicking performance after motor calibration or across different field textures. Thru learning from ARTEMIS locmotion stack, I gained the knowledge to develop the locomotion stack for Kid Cosmo.