LIMMS:Latching Intelligent Modular Mobility System
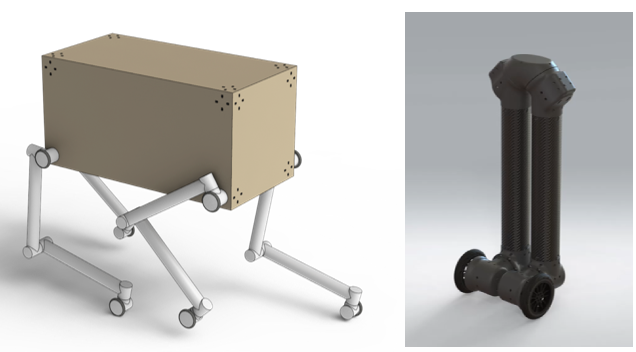
In this paper, we present LIMMS, a modular robotic system designed for versatile last-mile delivery through multi-agent collaboration. We developed a robust latching system that allows identical robotic modules to autonomously assemble into various configurations, enabling wheeled, bipedal, or quadrupedal locomotion. By integrating these diverse modes with collaborative manipulation, we demonstrate a flexible platform capable of navigating complex environments and handling various cargo tasks. Our work validates that this reconfigurable approach provides the necessary adaptability to overcome the physical constraints of traditional, single-purpose delivery robots.
Peronal Contribution¶
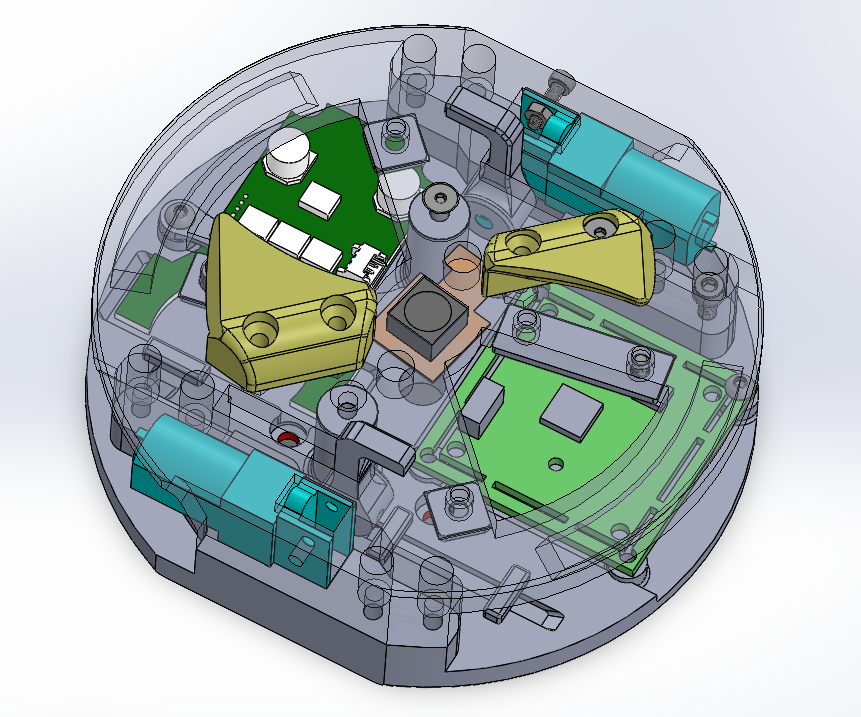
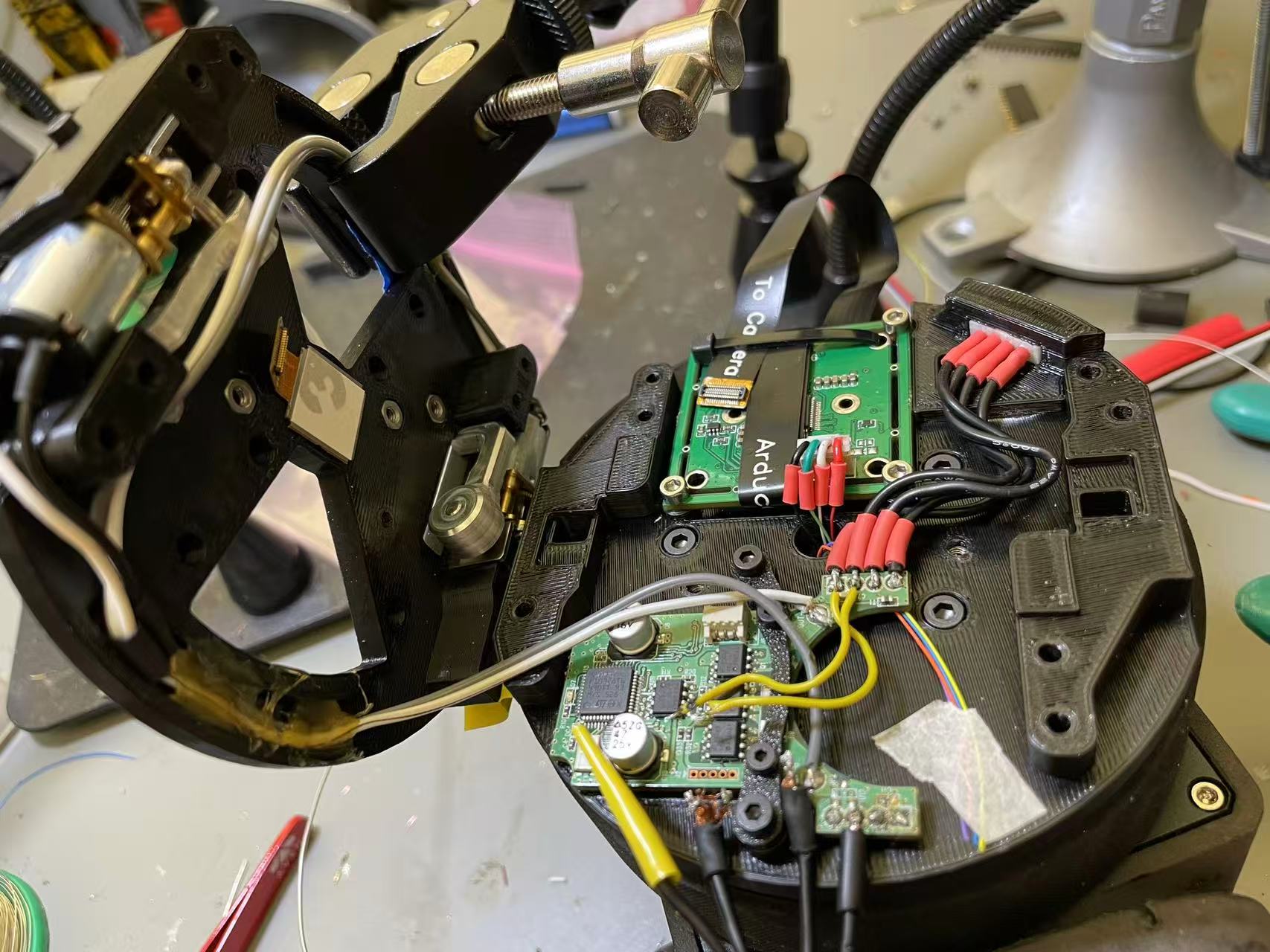
I transformed the initial latching concept into a robust, flight-ready module that serves as the critical interface for the LIMMS system. I spearheaded the full-stack integration of the latch, including the mechanical latch blades, micro-servos, motor drivers, and an onboard camera for vision-based processing. To ensure unrestricted 360-degree operation, I connected the module to the main LIMMS body via a slip ring, enabling stable power and data transmission. The final design delivers highly reliable latching performance, capable of supporting the module's own weight even under maximum cantilever (moment arm) conditions.